News & Events
Announcements

Congratulations to MANE Professor Dr. Shankar Narayan on receiving the HTD Boelter-McAdams Prize at the 2025 ASME Summer Heat Transfer Conference. This award is presented to a member of the Heat Transfer division of ASME that is recognized for their exemplary achievements and contributions to thermal science and engineering.

Congratulations to Dr. Johnson Samuel for being awarded the David M. Darrin ’40 Counseling Award for 2025!

A team of RPI graduates (Joe Adam '17, '18, '21, Tyler Mucci '21, '23, Cesar Gonzalez '20 and Nate Karwic '20) is preparing once again to remotely conduct experiments aboard the International Space Station (ISS). The ring-sheared drop module on the ISS is being utilized to advance our understanding of the flow of complex fluids and develop predictive modeling capabilities.
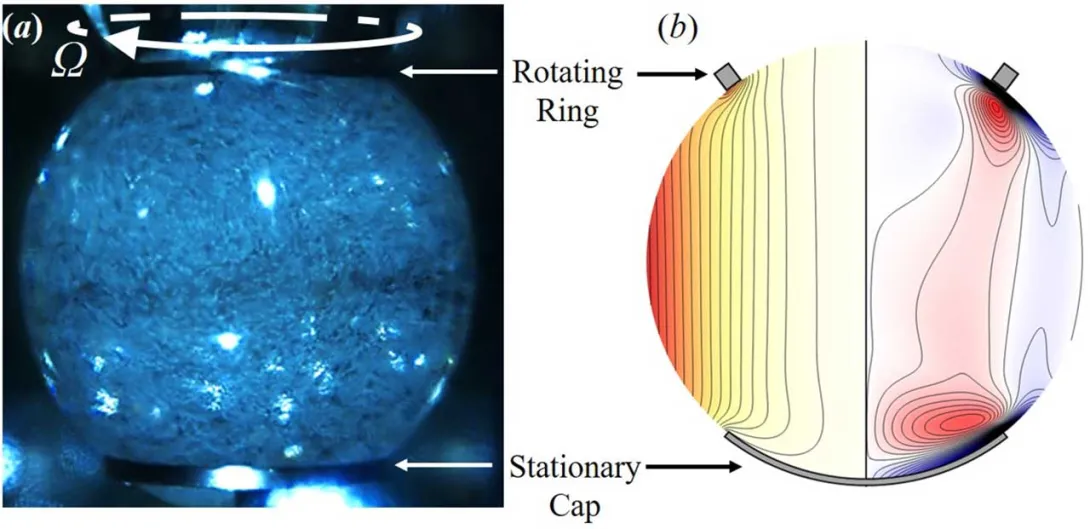
Research on the topic of "Improving Medicine Manufacturing", by MANE Professor Amir Hirsa, and his research lab has been mentioned in an article by ISS National Laboratory titled "NSF-Funded Research Heads to the International Space Station on NASA'S SpaceX CRS 32-Mission". The Rensselaer Polytechnic Institute, with support from Tec-Masters, expanded on prior research to study protein flow and clumping, a key issue affecting the quality of protein-based drugs.

MANE Alumna Jeanne Carboni Debonis '87 is going to be inducted into the RPI Athletics Hall of Fame! Each inductee exemplifies the highest standards of Rensselaer excellence, serving as an inspiration for future generations of student-athletes to pursue greatness—both in their sport and beyond.

Congratulations to Mechanical Engineering senior Shannon Brown who was named the Liberty League Women's Swimmer of the Year! Brown claimed victory in two individual events and anchored two winning relays at the 2025 Liberty League Championship, earning Swimmer of the Meet honors for the second consecutive year.

Congratulations to MANE students Christian Blanco, Andrew Hanson, and Jada Lin, members of The Silver Falcons Honor Guard representing Air Force ROTC Detachment 550 at RPI who took top honors at the annual Rensselaer Rumble Military Excellence Competition on February 1, 2025.

Clint Ballinger, Ph.D., professor of practice in the Department of Mechanical, Aerospace, and Nuclear Engineering (MANE) at Rensselaer Polytechnic Institute, is among 170 inventors elected by the National Academy of Inventors (NAI) to its 2024 Class of Fellows. Read the entire article here
Attend an information session to learn about exciting research opportunities, program requirements, funding options & application processes to MANE's Co-terminal, traditional and part-time Master's programs, and the Accelerated BS-PhD program.
Thursday, February 6th
Noon – 1:00 p.m.
JEC-3117
Tuesday, February 11th
4:00-5:00 p.m.
JEC-3117
Wednesday, February 26th
3:00 – 4:00 p.m.
JEC-3117

Congratulations to the Rensselaer Rocket Society Ascendants who took 2nd place at the 2024 Spaceport America Cup in the 30k SRAD Solid Motor category. Their rocket reached Mach 1.8 and 30,569 ft with a 30,000 altitude goal, closest to the target altitude in completion.
News

A student team from Rensselaer Polytechnic Institute (RPI) designed, built, and flew a remote-controlled aircraft that delivered one of the best overall flight performances in the history of the American Institute of Aeronautics and Astronautics (AIAA) Design Build Fly competition.

Rensselaer Polytechnic Institute (RPI) is proud to welcome the second cohort of Hudson Valley Community College (HVCC) students to the Semiconductor Scholars Program, an initiative supported by NORDTECH DoD Microelectronics Hub.

Rensselaer Polytechnic Institute (RPI) unveiled a cutting-edge nuclear training lab with a ribbon-cutting in Room 2027 of the Jonsson Engineering Center (JEC), a hub of RPI’s School of Engineering on its Troy campus.

Clint Ballinger, Ph.D., professor of practice in the Department of Mechanical, Aerospace, and Nuclear Engineering (MANE) at Rensselaer Polytechnic Institute, is among 170 inventors elected by the National Academy of Inventors (NAI) to its 2024 Class of Fellows.

As a third grader, Tahira Reid Smith ’00, ’04, Ph.D., was already thinking like an inventor. So, when her school, PS 97 in the Bronx, New York, held a poster contest where students were asked to depict something each of them wished he or she had, she didn’t draw a typical childhood fantasy. She designed a machine.

In ancient Greek mythology, the hero Theseus is famous for cleverly solving a labyrinth and defeating the Minotaur at its center. That story, as well as a famous maze experiment from the history of machine learning, is the inspiration for a new generative AI tool that helps researchers navigate the domain of computer modeling.

Imagine tires that charge a vehicle as it drives, streetlights powered by the rumble of traffic, or skyscrapers that generate electricity as the buildings naturally sway and shudder. These energy innovations could be possible thanks to researchers at Rensselaer Polytechnic Institute developing environmentally friendly materials that produce electricity when compressed or exposed to vibrations.

Rensselaer Polytechnic Institute has long been at the forefront of space exploration and discovery. On September 30, that storied legacy met the future at RPI’s Space Science and Technology Day.As part of RPI’s yearlong Bicentennial celebration honoring RPI’s rich history and the promising years to come, this event invited the Capital Region community to hear from alumni, students, and researchers propelling humanity’s space endeavors.

Ozioma Ozioko, a doctoral student at Rensselaer Polytechnic Institute, is on a mission to give her home country of Nigeria — and the rest of the world — ready access to solar energy. “Growing up, the power supply was very unstable. Sometimes we could go for a week without power. I remember my brothers and I doing our homework by the light of a kerosene lamp,” Ozioko said. “Nigeria has abundant solar energy resources, but the cost-effective utilization of these resources is a challenge. I want to change that.”

From lane-keep assistance to blind spot detection, today’s cars come equipped with autonomous driving features that make driving easier and safer. Rene Mai, a doctoral student at Rensselaer Polytechnic Institute, imagines a world in which humans and machines complement each other’s strengths to do more together, a concept known as “symbiotic autonomy.”
